“眼于手上”的嵌入式实践:基在ROS2与RK3576的机械臂追随抓取方案
发布时间:2026-04-10 来历:转载 责任编纂:lily
【导读】于上一篇技能实践中,咱们基在米尔RK3576焦点板与ROS2 Humble框架,乐成实现了呆板人使用SLAM Toolbox与Nav2举行自立建图与导航,解决了“呆板人怎样走到哪里”的基础挪动问题。还有要“看到并操作”——辨认特定物体、自动追随、近间隔抓取。本文将于此基础上,集成深度摄像头,实现呆板人焦点功效。咱们将重点使用RK3576内置的6TOPS NPU算力,部署高机能的MixFormerV2方针跟踪算法,以替换传统鲁棒性差的OpenCV要领,进而实现对于特定方针的精准辨认、底盘动态追随以和终极的机械臂自立抓取,完成“辨认-追随-抓取”这一繁杂使命链。
名词预先相识:
手眼转换:将相机看到的物体坐标转换到机械臂可履行的坐标系下。
逆运动学:给定结尾方针位姿,反解出机械臂各枢纽关头应动弹的角度。

图:米尔基在RK3576焦点板开发板
第一章:体系整体架构与硬件毗连
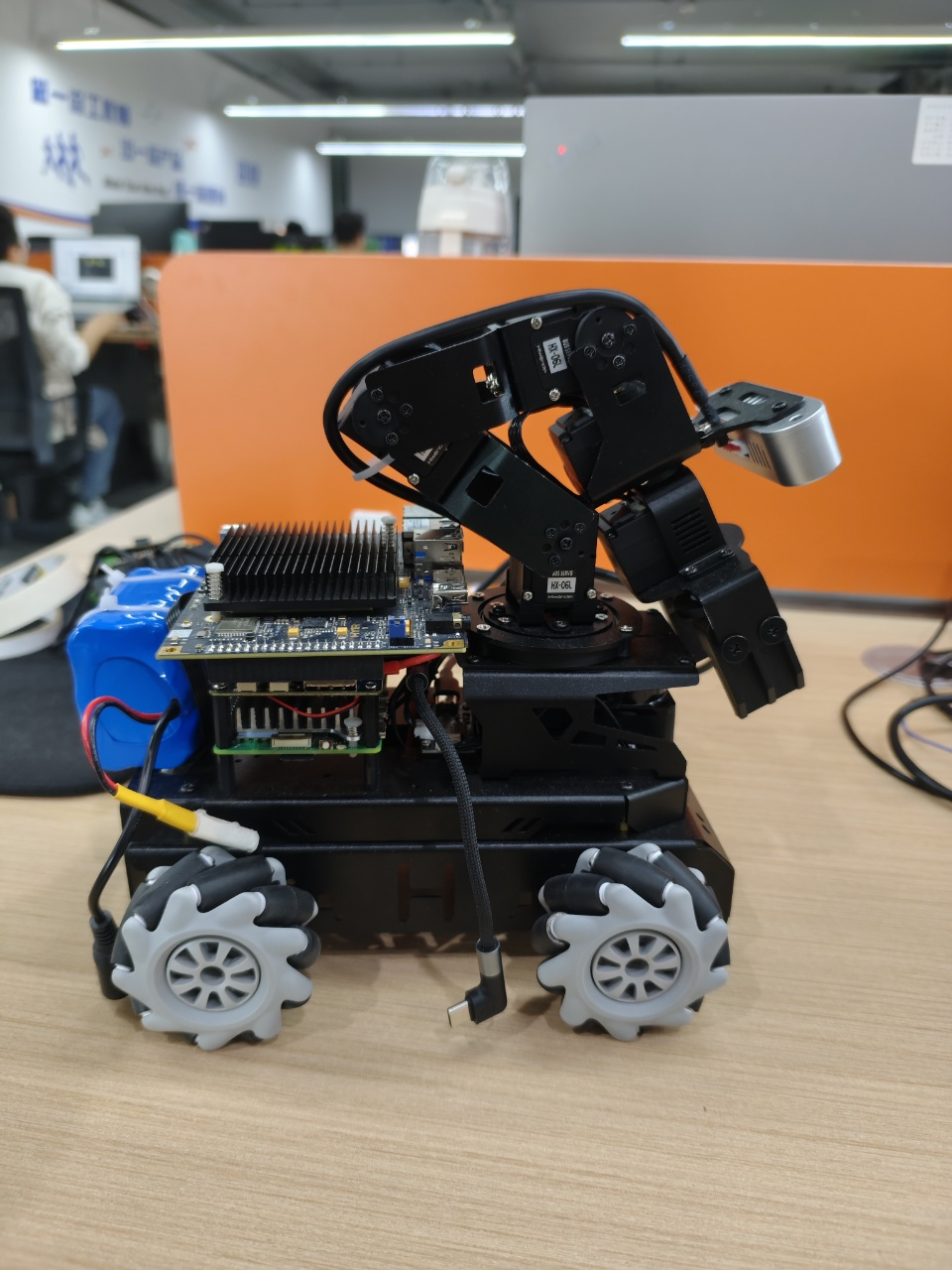
1.1 硬件构成
主控平台:米尔基在RK3576焦点板开发板(内置6TOPS NPU)
深度摄像头:RGB-D深度相机(输出RGB、IR、深度三路数据)
机械臂:6轴轻量机械臂(串口节制)
挪动底盘:STM32节制,麦克纳姆轮
1.2 软件模块与数据流
整个体系分为五个焦点ROS2节点:

模块 功效 输入 输出
camera_driver 发布RGB及深度图 RGB-D相机 RGB图象、深度图
mixformer_tracker NPU加快跟踪 RGB图 + 初始方针框 方针2D框 + 3D坐标
object_follower 节制底盘挪动 方针3D坐标 /cmd_vel 速率指令
grasp_planner 抓取计划 方针3D坐标 + 深度 机械臂运动轨迹
arm_controller 履行抓取 轨迹 夹爪状况
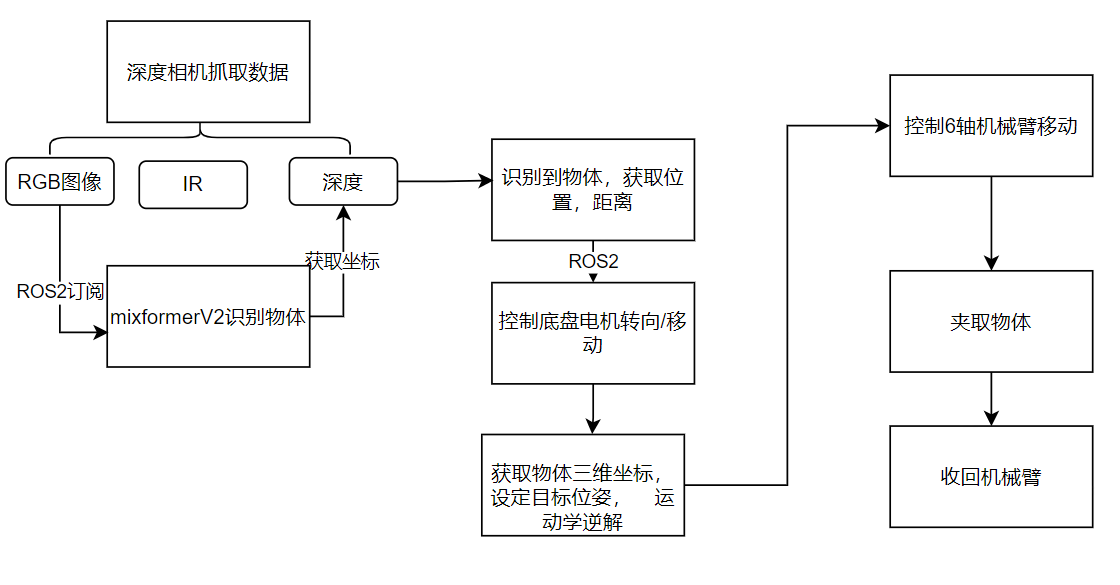
总体数据流:
相机 → MixFormerV2跟踪器 → 手眼转换 → 底盘追随节点 → 接近住手 → 机械臂逆运动学计划 → 抓取履行。
第二章:深度相机数据获取
与平凡USB摄像头差别,深度相机于ROS2下经由过程尺度驱动节点发布话题数据。本文利用的RGB-D相机输出三路信息:
RGB图象:用在方针跟踪的视觉输入
IR图象:辅助深度计较(夜间或者弱光可用)
深度图象:每一个像素的毫米级间隔值
相机输出格局为:640×400 NV12,帧率13~15 FPS。主控RK3576经由过程定阅ROS话题(如 /camera/color/image_raw 及 /camera/depth/image_raw)便可获取数据,无需直接操作 /dev/video* 节点。
要害点:深度图象与RGB图象需要时间对于齐及空间对于齐(凡是相机驱动已经提供对于齐后的深度图),以便后续将方针2D框映照到3D坐标。
第三章:NPU加快的MixFormerV2方针跟踪
3.1 为何抛却OpenCV,改用NPU+MixFormerV2?
传统OpenCV跟踪算法(KCF、CSRT等)于光照变化、遮挡、快速运动下轻易丢掉方针,且彻底依靠CPU,帧率受限。而MixFormerV2是一种基在Transformer的端到端跟踪器,精度高、鲁棒性好。共同RK3576内置的6TOPS NPU,可以:
推理速率晋升:单帧推理30ms摆布,现实跟踪帧率可达15~20 FPS;
CPU占用年夜幅降低:NPU自力处置惩罚视觉使命,CPU可专注ROS2通讯与运动节制;
功耗更低,合适嵌入式挪动呆板人。
3.2 模子转换与部署流程
1.模子转换:下载MixFormerV2的PyTorch权重,利用RKNN-Toolkit2东西转换为 .rknn 格局,并做INT8量化。
2.ROS2节点实现:
定阅RGB图象话题;
将图象缩放至模子输入尺寸(如224×224),举行预处置惩罚;
挪用NPU推理,输出方针界限框;
联合深度图中对于应区域的有用深度值,经由过程手眼转换获得方针于呆板人坐标系下的3D坐标(X, Y, Z);
发布 /target_3d_position 及 /tracking_box 话题。
3.机能匹配:相机帧率约15 FPS,MixFormerV2采用累计3帧一路推理的方式(batch size=3),单次耗时约70ms,总体匹配流利。
3.3 手眼转换
本文彩用 “眼于手上” 的配置:深度相机固定于机械臂结尾,随机械臂一路运动。此时,相机到机械臂结尾(camera_link → end_effector_link)的变换是固定的(可经由过程标定得到),而机械臂结尾到基座(end_effector_link → arm_base_link)的变换则随枢纽关头角度及时变化。
于ROS中,咱们需要:
标定相机到机械臂结尾的静态TF。
机械臂驱动节点按照当前枢纽关头角度及时发布 end_effector_link → arm_base_link 的动态TF。
经由过程 tf2 监听完备变换链,将物体坐标从相机系转换到机械臂基座系。
第四章:底盘挪动追随方针
当跟踪节点输出方针于呆板人底盘坐标系下的3D位置后,底盘追随节点 object_follower 履行如下逻辑:
计较相对于位置:获得方针相对于在呆板人中央的程度间隔及角度误差。
优先调解标的目的:先原地扭转,使呆板人正对于方针(角度误差 5°)。
进步至抓取间隔:连结正对于,以线速率向前挪动,直到间隔方针约0.5米(安全抓取规模)。
住手并通知抓取:达到抓取规模后,发布速率零指令,并触发抓取标记。
第五章:机械臂抓取物体
当底盘住手于抓取间隔(约0.5米)后,抓取节点启动。本体系不依靠MoveIt 2,所有机械臂节制经由过程串口直接下发各枢纽关头角度,逆运动学由咱们自行实现。
5.1 手眼转换(眼于手上)
相机固定于机械臂结尾,是以手眼转换分为两部门:
静态部门:相机到机械臂结尾的变换(camera_link → end_effector_link),经由过程一次标定获得固定值。
动态部门:机械臂结尾到基座的变换(end_effector_link → arm_base_link),由机械臂当前枢纽关头角度及时决议。
于抓取流程中,方针物体于相机图象中被检测到后,起首获得物体于相机坐标系下的3D坐标,然后经由过程ROS的tf2监听完备的变换链:camera_link → end_effector_link → arm_base_link,主动转换到机械臂基座坐标系。这一历程无需手动干涉干与,只要机械臂驱动节点准确发布枢纽关头状况及TF便可。
5.2 逆运动学解算
六轴机械臂经由过程串口吸收角度指令(每一个轴一个角度值)。为了抓取方针点,需要求解逆运动学:已经知结尾夹爪于机械臂基座下的方针位置(以和指望的姿态,例如垂直向下抓取),反算出6个枢纽关头的角度。
实现方式:针对于详细机械臂的几何参数(D-H参数),编写解析解或者数值迭代解(如雅可比伪逆法)。解析解速率快,合适固定构型;数值法通用但需留意收敛。
输出:6个枢纽关头角度(单元:度或者弧度),经由过程串口逐条发送(可同时发送或者按挨次挪动)。
5.3 抓取流程
获取方针坐标:从跟踪节点读取底盘住手刹时的方针3D点(已经转换到arm_base_link坐标系)。
设定抓取姿态:按照物体外形及相机视角,设定夹爪的指望标的目的(例如让夹爪程度或者垂直靠近)。这一步需联合经验预设。
逆运动学求解:输入结尾方针位姿,计较出各枢纽关头角度。若求解掉败(如方针凌驾事情空间),则调解底盘位置从头追随。
发送枢纽关头角度:经由过程串口依次发送6个枢纽关头的角度指令,等候机械臂运动到位(可简朴延时或者读取状况反馈)。
夹取:发送夹爪闭合指令(串口另外一号令),经由过程电流反馈或者限位开关判定是否夹住物体。
完成:抓取乐成后,机械臂连结闭合,底盘可原地等候下一步指令。
第六章:总结与瞻望
本文于上篇“建图与导航”的基础上,为米尔RK3576呆板人增长了“视觉追随与抓取”能力,实现了完备的“辨认-追随-抓取”闭环。要害技能包括:
MixFormerV2 + NPU 实现高能效方针跟踪;
手眼转换:将相机看到的物体坐标转换到机械臂可履行的坐标系下。本文彩用“眼于手上”配置(相机固定于机械臂结尾),需同时思量固定偏移及枢纽关头运动。
自研逆运动学 节制6轴机械臂精准抓取(不依靠MoveIt 2)。
米尔RK3576这一方案可广泛运用在办事呆板人、巡检呆板人、教诲竞赛等场景。下一步可摸索:
多方针切换追随;
动态避障与追随并行;
抓取后主动放置(联合上篇的导航回位功效)。

-永利3044官网


 永利3044官网GDSM-ES智能零售管理系统为全球零售门店客户提供了功能齐全的数字化运营管理工具,提供显示信息编辑、信息发布、AI识别、客户分析和会员管理等功能,实现了对设备、内容、营销、运营的综合数智化管理能力,为精准运营管理赋能。
永利3044官网GDSM-ES智能零售管理系统为全球零售门店客户提供了功能齐全的数字化运营管理工具,提供显示信息编辑、信息发布、AI识别、客户分析和会员管理等功能,实现了对设备、内容、营销、运营的综合数智化管理能力,为精准运营管理赋能。 智慧教育解决方案基于物联网和人工智能技术,实现设备的精益生产管理和最优级别运行。永利3044官网的嵌入式电脑、AI边缘计算等硬软件,可广泛应用于工业自动化、智能制造和智慧工厂...
智慧教育解决方案基于物联网和人工智能技术,实现设备的精益生产管理和最优级别运行。永利3044官网的嵌入式电脑、AI边缘计算等硬软件,可广泛应用于工业自动化、智能制造和智慧工厂... 智能办公解决方案基于物联网和人工智能技术,实现设备的精益生产管理和最优级别运行。永利3044官网的嵌入式电脑、AI边缘计算等硬软件,可广泛应用于工业自动化、智能制造和智慧工厂...
智能办公解决方案基于物联网和人工智能技术,实现设备的精益生产管理和最优级别运行。永利3044官网的嵌入式电脑、AI边缘计算等硬软件,可广泛应用于工业自动化、智能制造和智慧工厂... 智能制造解决方案基于物联网和人工智能技术,实现设备的精益生产管理和最优级别运行。永利3044官网的嵌入式电脑、AI边缘计算等硬软件,可广泛应用于工业自动化、智能制造和智慧工厂...
智能制造解决方案基于物联网和人工智能技术,实现设备的精益生产管理和最优级别运行。永利3044官网的嵌入式电脑、AI边缘计算等硬软件,可广泛应用于工业自动化、智能制造和智慧工厂... 智慧零售解决方案基于物联网和人工智能技术,实现设备的精益生产管理和最优级别运行。永利3044官网的嵌入式电脑、AI边缘计算等硬软件,可广泛应用于工业自动化、智能制造和智慧工厂...
智慧零售解决方案基于物联网和人工智能技术,实现设备的精益生产管理和最优级别运行。永利3044官网的嵌入式电脑、AI边缘计算等硬软件,可广泛应用于工业自动化、智能制造和智慧工厂... 交通物流解决方案基于物联网和人工智能技术,实现设备的精益生产管理和最优级别运行。永利3044官网的嵌入式电脑、AI边缘计算等硬软件,可广泛应用于工业自动化、智能制造和智慧工厂...
交通物流解决方案基于物联网和人工智能技术,实现设备的精益生产管理和最优级别运行。永利3044官网的嵌入式电脑、AI边缘计算等硬软件,可广泛应用于工业自动化、智能制造和智慧工厂... 智慧城市解决方案基于物联网和人工智能技术,实现设备的精益生产管理和最优级别运行。永利3044官网的嵌入式电脑、AI边缘计算等硬软件,可广泛应用于工业自动化、智能制造和智慧工厂...
智慧城市解决方案基于物联网和人工智能技术,实现设备的精益生产管理和最优级别运行。永利3044官网的嵌入式电脑、AI边缘计算等硬软件,可广泛应用于工业自动化、智能制造和智慧工厂... 智慧农业解决方案基于物联网和人工智能技术,实现设备的精益生产管理和最优级别运行。永利3044官网的嵌入式电脑、AI边缘计算等硬软件,可广泛应用于工业自动化、智能制造和智慧工厂...
智慧农业解决方案基于物联网和人工智能技术,实现设备的精益生产管理和最优级别运行。永利3044官网的嵌入式电脑、AI边缘计算等硬软件,可广泛应用于工业自动化、智能制造和智慧工厂...